如果输入 "Execute(执行)"设置为 "true(真)",则开始向指定的目标位置方向移动。目标位置可以绝对指定,也可以相对于当前托盘位置指定。路径参数可用于设置托盘应如何覆盖路径。
这里有 3 种可能性:
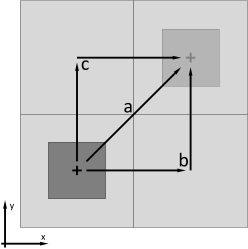
图路径选项
McAcp6DInPlanePathEnum |
描述 |
|
a |
mcACP6D_PATH_DIRECT |
托盘到达目标位置的直接路径。 |
b |
mcACP6D_PATH_X_THEN_Y |
托盘首先沿 x 轴移动,直至到达 x 目标位置。然后,托盘沿 y 轴移动到 y 目标位置。该移动在后台分为两个移动命令。 |
c |
mcACP6D_PATH_Y_THEN_X |
托盘首先沿 x 轴移动,直至到达 x 目标位置。然后,托盘沿 x 轴移动到 x 目标位置。该移动在后台分为两个移动指令。 |
如果托盘当前正在执行运动,则新命令将存储在运动缓冲区中,并在处理完之前所有命令后执行。
还可以在功能块上指定所需的末端速度。如果该值大于 0,托盘将以该速度到达目标位置。通过该功能,可以在不停止的情况下过渡到运动缓冲区中的另一条运动指令。如果没有其他运动指令,则在目标位置处会出现过冲,因为托盘必须首先减速,然后尽快返回目标位置。
信息:
如果指定的最大速度和加速度超出了配置的系统限制,ACOPOS 6D 控制器将自动对其进行限制。
如果目标位置位于某定子电机的边缘,而以末端速度超程将意味着超过边缘,则运动指令将被拒绝。
如果到目标位置的距离太短,无法达到指定的末端速度,则会自动限制到可实现的速度值。
This function block performs a linear movement in 2-dimensional space in the direction of the target position.
If input "Execute" is set to TRUE, a movement starts in the direction of the specified target position. The target position can be specified absolutely or relative to the current shuttle position. The path parameter can be used to set how the shuttle should cover the path.
There are 3 possibilities here:
Fig.: Path options
McAcp6DInPlanePathEnum |
Description |
|
a |
mcACP6D_PATH_DIRECT |
The shuttle travels on a direct path to the target position. |
b |
mcACP6D_PATH_X_THEN_Y |
The shuttle first moves along the x-axis until the x-target position is reached. The shuttle then moves along the y-axis to the y-target position. The movement is divided into two movement commands in the background. |
c |
mcACP6D_PATH_Y_THEN_X |
The shuttle first moves along the x-axis until the x-target position is reached. The shuttle then moves along the x-axis to the x-target position. The movement is divided into two movement commands in the background. |
If the shuttle is currently performing a movement, the new command is stored in the movement buffer and executed after all previous commands have been processed.
A desired end velocity can also be specified on the function block. If this value is greater than 0, the shuttle will reach the target position at this velocity. This function makes it possible to transition to another movement command that is already in the movement buffer without stopping. If there is no additional movement command, there will be overshoot at the target position since the shuttle must first be slowed down and then return to the target position as quickly as possible.
Information:
The specified maximum velocity and acceleration are automatically limited by the ACOPOS 6D controller if they are outside the configured system limits.
If the target position is at the edge of a segment and overshooting by the end velocity would mean exceeding the edge, the movement command is rejected.
If the distance to the target position is too short to reach the specified end velocity, this is automatically limited to an achievable speed value.