如果输入 "Execute(执行)"设置为 "TRUE(真)",则在短轴上按照指定的目标位置方向开始运动。目标位置可以绝对指定,也可以相对于当前托盘位置指定。
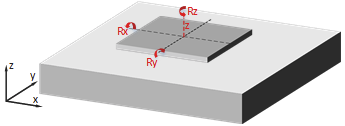
默认情况下,托盘围绕托盘中心点移动。也可以定义一个旋转中心,用于围绕 Rx、Ry 和 Rz 的旋转运动。
描述 |
|
mcACP6D_SHORT_AX_ROT_ONLY |
围绕托盘中心点执行运动。 |
mcACP6D_SHORT_AX_ROT_CENTER |
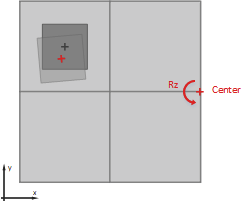
围绕指定点执行旋转运动。该模式仅适用于围绕 Rx、Ry 和 Rz 的运动。 |
围绕托盘中心点执行运动。仅改变托盘短轴上的位置。这意味着托盘在 X 和 Y 轴上的当前位置保持不变。
mcACP6D_SHORT_AX_ROT_CENTER
该命令仅作用于短轴 Rx、Ry 和 Rz。由于执行旋转运动所围绕的旋转中心位于托盘中心之外,因此 X、Y 和 Z 轴上的托盘位置也会受到该运动的影响。
指定的 Z 位置不作为托盘的目标位置,而是作为旋转中心的 Z 位置。
Rx 示例
托盘位置:X = 0.12 m / Y = 0.12 m / Z = 0.002 m / Rx = Ry = Rz = 0 rad
目标位置:Z = 0.002 m / Rx = 0.034907 rad (2°) / Ry = Rz = 0 rad
旋转类型 = mcACP6D_SHORT_AX_ROT_CENTER
旋转中心:X = 0.12 m / Y = 0.36 m

Ry 示例
托盘位置:X = 0.12 m / Y = 0.12 m / Z = 0.002 m / Rx = Ry = Rz = 0 rad
目标位置:Z = 0.002 m / Ry = 0.034907 rad (2°) / Rx = Rz = 0 rad
旋转类型 = mcACP6D_SHORT_AX_ROT_CENTER
旋转中心:X = 0.36 m / Y = 0.12 m

Rz 示例
托盘位置:X = 0.12 m / Y = 0.36 m / Z = 0.002 m / Rx = Ry = Rz = 0 rad
目标位置:Z = 0.002 m / Rz = 0.087266 rad (5°) / Rx = Ry = 0 rad
旋转类型 = mcACP6D_SHORT_AX_ROT_CENTER
旋转中心:X = 0.48 米 / Y = 0.24 米
如果托盘当前正在执行运动,新命令将存储在运动缓冲区中,并在处理完之前所有命令后执行。
信息:
如果指定的最大速度超出配置的系统限制,ACOPOS 6D 控制器将自动对其进行限制。
信息:
托盘当前的 Z 位置会影响 Rx 和 Ry 的倾斜限制。如果由于托盘的当前 Z 位置而与定子电机发生接触,则围绕 Rx 和 Ry 的倾斜运动将被拒绝。
The function block performs a movement for all short axes (Z, Rx, Ry, Rz).
If input "Execute" is set to TRUE, a movement starts in the direction of the specified target position on the short axes. The target position can be specified absolutely or relative to the current shuttle position.
By default, the shuttle moves around the shuttle center point. It is also possible to define a center of rotation for rotational movements around Rx, Ry and Rz.
Description |
|
mcACP6D_SHORT_AX_ROT_ONLY |
Performs the movement around the shuttle center point. |
mcACP6D_ SHORT_AX_ROT_CENTER |
Performs the rotational movement around a defined point. This mode works only for movements around Rx, Ry and Rz. |
Performs the movement around the shuttle center point. Only the positions on the short axes of the shuttle change. This means that the current position of the shuttle in X and Y is retained.
mcACP6D_SHORT_AX_ROT_CENTER
The command acts only on short axes Rx, Ry and Rz. The shuttle positions in X, Y and Z are also affected by the movement since the center of rotation around which the rotational movement is performed is located outside the shuttle center.
The specified Z position is not used as the target position for the shuttle, but as the Z position of the center of rotation.
Example for Rx:
Shuttle position: X = 0.12 m / Y = 0.12 m / Z = 0.002 m / Rx = Ry = Rz = 0 rad
Target position: Z = 0.002 m / Rx = 0.034907 rad (2°) / Ry = Rz = 0 rad
Rotation type = mcACP6D_SHORT_AX_ROT_CENTER
Center of rotation: X = 0.12 m / Y = 0.36 m
Example for Ry:
Shuttle position: X = 0.12 m / Y = 0.12 m / Z = 0.002 m / Rx = Ry = Rz = 0 rad
Target position: Z = 0.002 m / Ry = 0.034907 rad (2°) / Rx = Rz = 0 rad
Rotation type = mcACP6D_SHORT_AX_ROT_CENTER
Center of rotation: X = 0.36 m / Y = 0.12 m
Example for Rz:
Shuttle position: X = 0.12 m / Y = 0.36 m / Z = 0.002 m / Rx = Ry = Rz = 0 rad
Target position: Z = 0.002 m / Rz = 0.087266 rad (5°) / Rx = Ry = 0 rad
Rotation type = mcACP6D_SHORT_AX_ROT_CENTER
Center of rotation: X = 0.48 m / Y = 0.24 m
If the shuttle is currently performing a movement, the new command is stored in the movement buffer and executed after all previous commands have been processed.
Information:
The specified maximum velocity is automatically limited by the ACOPOS 6D controller if they are outside the configured system limits.
Information:
The current Z position of the shuttle affects the tilt limits in Rx and Ry. Tilt movements around Rx and Ry are rejected if contact with the segment would occur due to the current Z position of the shuttle.