等同于PM Tool中的autodriving功能,常用于动子的自动初始化。
Parameters中可以设置Zone,使得动子初始化限定在特定的区域内。
该功能块不能多个同时执行。
Function block
Interface
I/O |
Parameter |
Data type |
Description |
IN |
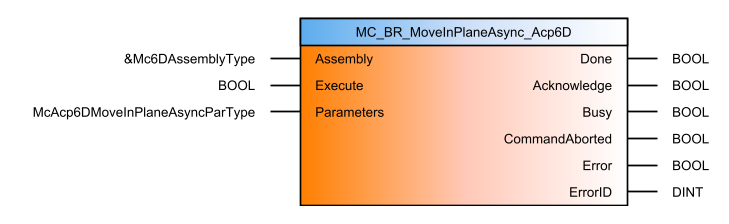
Reference to Mc6DAssemblyType |
程序集引用建立了功能块与程序集之间的连接。 |
|
IN |
Execute |
BOOL |
功能块的执行从该输入的上升沿开始。 |
IN |
Parameters |
功能块参数 |
|
OUT |
Done |
BOOL |
执行成功,功能块结束。 |
OUT |
Acknowledge |
BOOL |
ACOPOS 6D 控制器接受该命令。 |
OUT |
Busy |
BOOL |
功能块处于激活状态,必须继续调用。 |
OUT |
CommandAborted |
BOOL |
命令被其他命令中止。 |
OUT |
Error |
BOOL |
执行过程中出错。 |
OUT |
ErrorID |
DINT |
错误编号 |
Table: Parameter
Topics in this section:
此功能对应PMTool: AutoDriving
The function block simultaneously performs a movement for up to 78 shuttles in 2-dimensional space.
Function block
Interface
I/O |
Parameter |
Data type |
Description |
IN |
Reference to Mc6DAssemblyType |
The assembly reference establishes the connection between the function block and an assembly. |
|
IN |
Execute |
BOOL |
Execution of the function block begins on a rising edge of this input. |
IN |
Parameters |
Parameters of the function block |
|
OUT |
Done |
BOOL |
Execution successful, function block finished. |
OUT |
Acknowledge |
BOOL |
The command is accepted by the ACOPOS 6D controller. |
OUT |
Busy |
BOOL |
The function block is active and must continue to be called. |
OUT |
CommandAborted |
BOOL |
The command was aborted by another command. |
OUT |
Error |
BOOL |
Error during execution. |
OUT |
ErrorID |
DINT |
Error number |
Table: Parameter