功能启动说明
CyclicPosition.x 与CyclicPosition.y是相对位置,且相对位置指的是相对功能块Enable时刻的位置,即刚Enable时,CyclicPosition.x与CyclicPosition.y的数值应当为0。
数值应提前做好规划,避免两点之间的数据不合理
单位是米,功能块放到1ms循环的话就是1ms。
每次给0.00001 放在1ms循环,1s就是走0.01m = 10 mm
相对位置指的是相对功能块Enable时刻的位置,不是相对上一周期的位置
然后相邻两个时刻的位置,要满足条件:
位置指的是XYZ三个方向的合位置
1)一阶差分 < 2m/s
一阶差分就是(当前位置-前一个位置)/时间间隔
2)二阶差分 < 20m/s^2
二阶差分是一阶差分再做一阶差分
若数据不合理,可能会导致托盘因与设定位置偏差过大而导致停止运动掉落
多个托盘小车每1ms返回当前位置
使用mapp6D 1.10及以后版本,使用ReadCyclicPostion可以实现两个托盘,同时每1ms更新位置。
使用mapp6D 1.9版本,无法使用ReadCyclicPostion对多于1个托盘在一个周期内调用获取每1ms的位置。

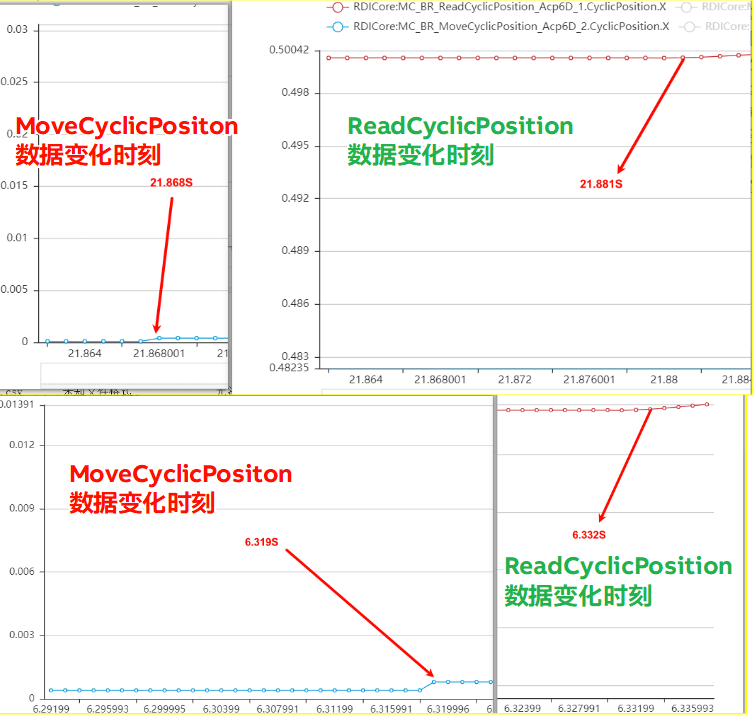
托盘发送MoveCyclicPostion与通过ReadCyclicPosition获取当前位置,有多大时延
使用mapp6D 1.10版本测试,1个托盘,2个托盘,均是有13ms的时延
一个托盘MoveCylicPosition与ReadCylicPosition测试
两个功能块一直enable,如下图(左图为MoveCylicPosition中X变化的时间,右图为ReadCylicPosition读取到位置变化的时间),托盘初始X=0.5。分别设定X方向相对位移0.0004和0.0008、0.001。均在MoveCylicPosition的X变化13ms后,ReadCylicPosition才读到位置变化。